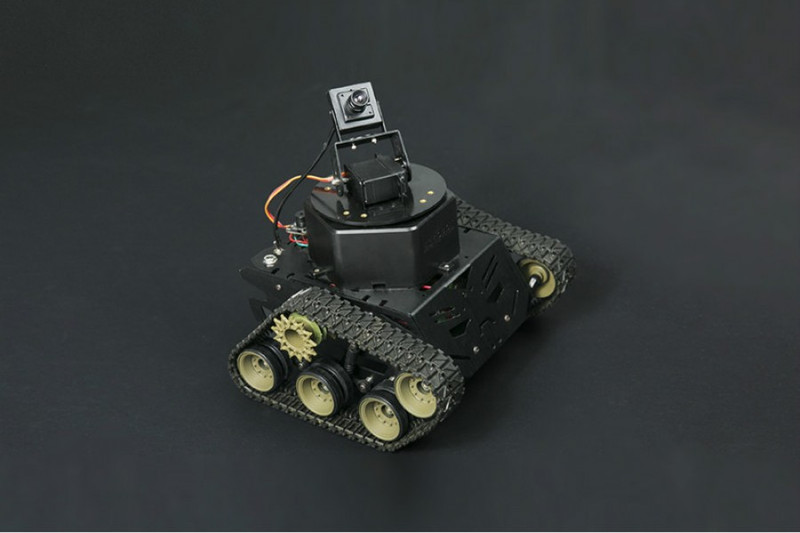





DFRobot Devastator Robot Kit (Built-in WiFi Vision and Sensors) - By Intel Edison
MPN: ROB0125
Продажа и доставка осуществляется:

Где купить и цены (Реклама *)
Наверх

|
|
в наличии
|
* Указанные предложения размещаются на правах рекламы и могут быть устаревшими. Полную информацию о предложении Вы получите на сайте рекламодателя
Технические характеристики
Наверх
-
Способы оплаты
Для оплаты товаров и услуг на нашем портале, Вы всегда получаете счет, в котором Вам необходимо самостоятельно указать свои данные.
Мы принимаем к оплате: